
Neste projeto, vamos desarmar um carrinho de controle remoto, substituindo a sua eletrónica por um microprocessador Arduino controlado por dispositivo Android.
Sempre que passo em uma loja de brinquedos e vejo carrinhos de controle remoto na vitrine, fico doido para levar-los para casa, deve ser porque tinha adoração por este tipo de brinquedo, mas por falta de opções e grana, não cheguei a ter um quando criança. Para compensar e ter uma desculpa para comprar um ? vamos desmontar um desses, “raqueando” suas principais partes e substituindo a eletrônica embarcada original por um microcontrolador tipo Arduino facilmente comandado a distância por um dispositivo Android. Com isso, ficará muito fácil adicionar ao carrinho novas funcionalidades, sensores, etc. É uma forma muito barata de se construir um robô para uso didático.
O vídeo abaixo, mostra como ficará o projeto final:
CONHECENDO O CARRINHO

O primeiro passo será desarmar o carrinho para se ter uma idéia de como ele funciona, o que se aproveitará e o que se deve ser adicionado:


Sempre que passo em uma loja de brinquedos e vejo carrinhos de controle remoto na vitrine, fico doido para levar-los para casa, deve ser porque tinha adoração por este tipo de brinquedo, mas por falta de opções e grana, não cheguei a ter um quando criança. Para compensar e ter uma desculpa para comprar um ? vamos desmontar um desses, “raqueando” suas principais partes e substituindo a eletrônica embarcada original por um microcontrolador tipo Arduino facilmente comandado a distância por um dispositivo Android. Com isso, ficará muito fácil adicionar ao carrinho novas funcionalidades, sensores, etc. É uma forma muito barata de se construir um robô para uso didático.
O vídeo abaixo, mostra como ficará o projeto final:
CONHECENDO O CARRINHO
O primeiro passo será desarmar o carrinho para se ter uma idéia de como ele funciona, o que se aproveitará e o que se deve ser adicionado:
Na parte inferior da carcaça, estão os os dois motores (frontal e traseiro), o compartimento da bateria (recarregável, 5V) e o modulo eletrônico. Na parte superior da carcaça, está a antena (placa de cobre conectada a um cabo negro) e os 4 LEDs que funcionam como os faróis dianteiros e traseiros. Cada LED está conectado separadamente por um par de fios. Com esse arranjo, se pode:
- Acender os faróis (acender os dois LEDs frontais)
- Dar pisca (acender os LEDs esquerdos ou direitos)
- Sinalizar uma frenagem (acender os dois LEDs traseiros)
O diagrama em blocos da eletrônica original é:

Em relação a mobilidade, nos projetos anteriores de robôs utilizamos a técnica de “Differential Steering” onde variando-se o sentido de giro das rodas, varia-se a direção do rob0, mas aqui se pode ver que o carrinho, apesar de também possuir dois motores DC , possui uma confirmação diferente de motores:
 O motor frontal, não possui nenhum controle de velocidade ou posição, sendo utilizado apenas para virar o carrinho “à direita”ou “à esquerda”, movendo-se simultaneamente todo o conjunto rodas/eixo frontal (mais ou menos como em um automóvel). Em geral o carrinho sempre se move para a frente em linha reta e o motor está desligado, deixando assim as rodas livres. Um comando para “virar à esquerda” p
O motor frontal, não possui nenhum controle de velocidade ou posição, sendo utilizado apenas para virar o carrinho “à direita”ou “à esquerda”, movendo-se simultaneamente todo o conjunto rodas/eixo frontal (mais ou menos como em um automóvel). Em geral o carrinho sempre se move para a frente em linha reta e o motor está desligado, deixando assim as rodas livres. Um comando para “virar à esquerda” p or exemplo, fará o motor girar, fazendo o mecanismo de engrenagens como um todo se mover para a esquerda. Enquanto o motor estiver alimentado o mecanismo ficará nessa posição limite e o carrinho continuará “virando à esquerda”).
or exemplo, fará o motor girar, fazendo o mecanismo de engrenagens como um todo se mover para a esquerda. Enquanto o motor estiver alimentado o mecanismo ficará nessa posição limite e o carrinho continuará “virando à esquerda”).


O motor traseiro está acoplado a um sistema redutor de velocidade por engrenagens e fornece torque variável as rodas traseiras (conjunto fixo). Pode-se assim variar a velocidade, mas não a direção (as duas rodas sempre girarão em um mesmo sentido).
CLASSIFICAR A ELETRÓNICA EMBARCADA
Uma vez que tudo foi identificado, é a hora de remover a eletrónica original, deixando somente os cabos dos motores e bateria. Como não vou voltar a usar a carcaça superior por enquanto, não me preocuparei com os LEDs originais.


No lugar do módulo eletrónico, usaremos um Arduino Uno, que será o responsável pela lógica do processamento, acionando os motores, LEDs e um Buzzer. O controle remoto que antes era conseguido por um sistema receptor de RF de 27MHz será agora substituído pelo modulo HC-06, o qual se comunicará com um dispositivo Android. A bateria original do carrinho será mantida exclusivamente para a alimentação dos motores via a H-Bridge L293D, pois os motores DC além de consumirem bastante corrente geram ruído devido a suas escovas. Pela maneira que o carrinho foi construído, o motor frontal consome bastante energia no momento em que recebe um comando de virar para um dos lados, pois seu eixo será travado e o consumo de corrente será alto. Para o Arduino usaremos uma bateria de 9V (Vin), sendo que o modulo HC-06 será alimentado pela saída de 5V do Arduino).
O novo diagrama de blocos para implementação do circuito é:

Neste ponto é importante testar os motores individualmente. Usando uma bateria, alimente o motor e observe para que lado lado ele gira. Inverta a bateria e repita o teste anotando as cores dos fios:
No caso de meu carrinho, temos:
Front Motor:
- Yellow: LEFT
- White: RIGH
Rear Motor:
- Green: Backward
- Blue: Forward
MONTAGEM FINAL
O circuito (as cores dos fios do motor não são as corretas):
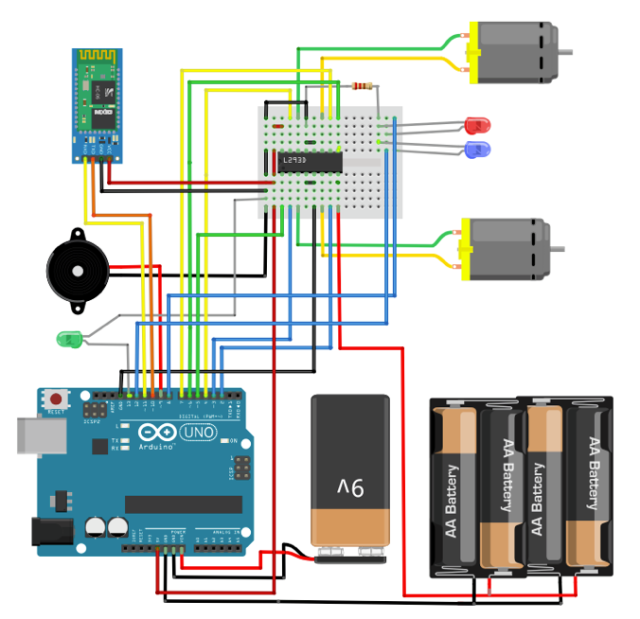
O HW do novo carrinho à controle remoto está pronto para seus primeiros testes. Agora, falta implementar o SW e o aplicativo Android.


O APLICATIVO ANDROID
![]()
Para controlar o carrinho, usaremos uma App que desenvolvi utilizando o MIT AppInventor 2: “MJRoBot BT Remote Control”. A app pode ser baixada gratuitamente da loja da Google através do link: MJRoBot BT Remote Control
A app possui uma interface simples, permitindo o envio de comandos ao modulo de BT tanto em modo TEXT, como diretamente via botões pre-programados (cada vez que um botão é pressionado, um caracter é enviado):
 w: Forward
w: Forward
s: Backward
d: Right
a: Left
f: Stop
p: ON/OFF
m: Manual / Automatic
+: Speed+
-: Speed-
Também existe uma janela de texto para mensagens recebidas do modulo BT. Esta característica é bem importante durante a fase de testes, pois pode ser usada da mesma maneira que o “Serial monitor”.
O Diagrama de blocos para o projeto no MIT appInventor2:

O CÓDIGO ARDUINO
O bloco principal do código é bem simples:
void loop()
{
checkBTcmd(); // verify if a command is received from BT remote control
receiveCmd ();
if (turnOn) manualCmd ();
else stopRobot ();
}
A primeira coisa a se fazer é verificar se existe algum novo comando BT chegando. Quem checará isso é a função “checkBTcmd()”:
void checkBTcmd() // verify if a command is received from BT remote control
{
if (BT1.available())
{
command = BT1.read();
BT1.flush();
}
}
A variável “turnOn” é utilizada para ligar ou desligar o carrinho. A função “receiveCmd()” será a encarregada de definir o status dessa variável em função do comando recebido do modulo BT. Observe que pela lógica usada, cada vez que o botão vermelho com o símbolo de “POWER” é pressionado, o caracter “p” será enviado pelo app e a a variável “turnOn”, mudará se valor (de 1 para 0 e vice e versa):
void receiveCmd ()
{
switch (command)
{
case 'p':
turnOn = !turnOn;
command = 0;
analogWrite(ledStatus, turnOn*128); // Robot ON - Led ON
beep(outBuz, 1000, 100);
BT1.print(" COMMAND ON/OFF");
BT1.println('\n');
delay(200); //Delay to call attention to mode change
break;
case 'm': //not used here
break;
}
}
Voltando ao loop principal, enquanto a variável “turnOn” é HIGH (1), a função “manualCmd()” executará um comando, dependendo do caracter recebido:
void manualCmd()
{
switch (command)
{
case 'f':
moveStop(); //turn off both motors
state = command;
break;
case 'w':
moveForward();
state = command;
break;
case 'd':
moveRight();
break;
case 'a':
moveLeft();
break;
case 's':
moveBackward();
state = command;
break;
case '+':
if (state == 'w')
{
motorSpeed = motorSpeed + 10;
if (motorSpeed > MAX_SPEED) motorSpeed = MAX_SPEED;
command = 'w';
} else command = state;
break;
case '-':
if (state == 'w') motorSpeed = motorSpeed - 10;
if (motorSpeed < MIN_SPEED ) motorSpeed = MIN_SPEED;
command = state;
break;
}
}
Por exemplo, se o comando “w” é recebido a função específica para mover o carrinho para a frente “moveForward()” é executada.
Em caso “powerOn” esteja em HIGH e a tecla “POWER” seja pressionada, a variável “powerOn”, passará a LOW e a função “stopRobot()” será a executada ao invés de “manualCmd()”. Esta função garante que o motor traseiro esteja parado, os LEDs apagados e variáveis zeradas.
void stopRobot ()
{
digitalWrite(ledBlue, LOW);
digitalWrite(ledRed, LOW);
state = 0;
moveStop(); //turn off both motors
}
ACIONANDO OS MOTORES DC VIA H-BRIDGE
Os motores frontal e traseiro estão ligados a ponte-H como mostrado abaixo:

e a cada um dos pinos do Arduino, os quais deverão ser definidos como OUTPUT, será atribuído uma variável:
const int rearMtFw = 4; // Rear Motor - FW const int rearMtBw = 7; // Rear Motor - BW const int rearMtEne = 6; // Rear Motor - enable const int frontMtLeft = 2; // Front Motor - turn Left const int frontMtRight = 3; // Front Motor - turn right const int frontMtEne = 5; // Front Motor enable
Por exemplo, se desejamos mover o carrinho para a frente, a função “moveForward()” deverá colocar o pino 4 en HIGH e o pino 7 em LOW, isso fará com que a corrente flua “no sentido horário”, como mostrado no diagrama abaixo:
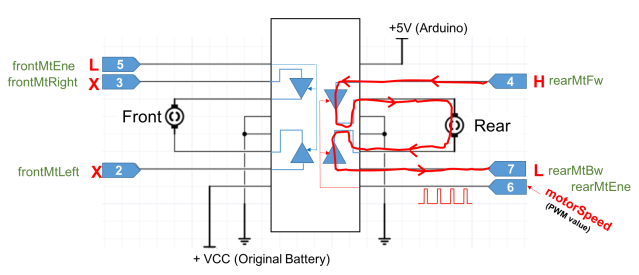
O pino 6 é o “enable”, somente quando ele estiver em “HIGH”, a ponte permitirá o fluxo de corrente pelo motor. Como este pino possui característica PWM, a velocidade com que o motor girará, dependerá do valor da variável “motorSpeed”, no pino 6 (valor de 0 255).
A função também deverá garantir que o motor frontal “gire livremente”, e para isso o pino 5, que é o pino de “enable” deverá estar em LOW (o status dos pinos 2 e 3 não importam, uma vez que o enable está el LOW). O LED vermelho, que funciona como “luz de ré”, deverá sempre estar apagado quando o carrinho se move para a frente:
void moveForward() // rear motor FW
{
analogWrite(rearMtEne, motorSpeed);
digitalWrite(rearMtFw, HIGH);
digitalWrite(rearMtBw, LOW);
digitalWrite(frontMtEne, LOW);
digitalWrite(ledRed, LOW);
delay(5);
}
por analogia, é obvio que para o carrinho “mover para trás”, basta que o motor gire na direção contrária. Para isto, o pino 4 deverá estar em LOW e o pino 7 em HIGH. Note que nesse caso a “luz de ré”, deverá estar acesa. A função neste caso será:
void moveBackward() // rear motor BW
{
analogWrite(rearMtEne, motorSpeed);
digitalWrite(rearMtFw, LOW);
digitalWrite(rearMtBw, HIGH);
digitalWrite(frontMtEne, LOW);
digitalWrite(ledRed, HIGH);
delay(5);
}
O mesmo raciocínio pode ser utilizado para o motor frontal, somente que nesse caso, não existe controle de velocidade. Colocando o pino 2 (enable) em HIGH habilita o motor a “tentar girar”, para um lado ou para outro dependendo do status dos pinos 2 e 3:
void moveLeft() // front motor left
{
digitalWrite(frontMtEne, HIGH);
digitalWrite(frontMtLeft, HIGH);
digitalWrite(frontMtRight, LOW);
digitalWrite(ledRed, LOW);
delay(10);
}
//************************************//
void moveRight() // front motor right
{
digitalWrite(frontMtEne, HIGH);
digitalWrite(frontMtLeft, LOW);
digitalWrite(frontMtRight, HIGH);
digitalWrite(ledRed, LOW);
delay(10);
}
Para parar o carrinho, basta colocar todas as saídas da ponte relativas ao motor traseiro em LOW, o que “travará” o eixo do motor (o motor frontal basta o enable estar em LOW):
void moveStop() //turn off rear motor
{
analogWrite(rearMtEne, LOW);
digitalWrite(rearMtFw, LOW);
digitalWrite(rearMtBw, LOW);
digitalWrite(frontMtEne, LOW);
digitalWrite(ledRed, LOW);
delay(5);
}
No link abaixo, você poderá encontrar o código completo para o Arduino:
CONCLUSÃO

O carrinho está devidamente raqueado e pronto para ganhar o mundo! Agora o céu é o limite! Comece, por exemplo instando sensores para evitar obstáculos, um HC-04 (ultra-som) funcionará bem, como vimos no caso do “Mars Rover” tupiniquim. Crie um novo comando e envie o “caracter” via texto (ou use o botão Man/Auto: caracter “m”, para o robô executar outras fincões (buzina, por exemplo).
 Outra idéia interessante é melhorar a “dirigibilidade” do carrinho. O motor DC frontal poderia ser substituído por um servo de 180o que movimentaria o conjunto frontal de maneira linear, obtendo-se assim ângulos de virada variáveis. A foto ao lado é de um exemplo que encontrei a web. Não é exatamente o mecanismo do meu carrinho, mas mas mostra como poderia ficar.
Outra idéia interessante é melhorar a “dirigibilidade” do carrinho. O motor DC frontal poderia ser substituído por um servo de 180o que movimentaria o conjunto frontal de maneira linear, obtendo-se assim ângulos de virada variáveis. A foto ao lado é de um exemplo que encontrei a web. Não é exatamente o mecanismo do meu carrinho, mas mas mostra como poderia ficar.
Artigo disponibilizado por MJRobot.org
Todos os produtos utilizados neste artigo podem ser encontrados na Loja de Eletrónica e Robótica – ElectroFun.
Gostaram deste artigo? Deixem o vosso comentário no formulário a baixo e partilhem com os vossos amigos.
Não se esqueçam de fazer like na nossa Página no Facebook.
Podem ainda colocar as vossas dúvidas no nosso Forum da Comunidade Arduino em Portugal ou no nosso Grupo no Facebook Arduino Portugal – Qual o teu projeto?